您现在的位置是:主页 > news > 给我一个网页/杭州百度seo代理
给我一个网页/杭州百度seo代理
![]() admin2025/5/7 16:25:32【news】
admin2025/5/7 16:25:32【news】
简介给我一个网页,杭州百度seo代理,如何建设一个好的企业网站,奢侈品网站策划方案1.前言 在上一篇【ROS2中用MoveIt2控制自己的舵机机械手(4)】,我们已经实现了上下位机的通讯。由于目前使用的是舵机,MCU(stm32)是无法从舵机那里读取到当前的角度的,因此下位机发给上位机的协议暂时没必要实现&#…
1.前言
在上一篇【ROS2中用MoveIt2控制自己的舵机机械手(4)】,我们已经实现了上下位机的通讯。由于目前使用的是舵机,MCU(stm32)是无法从舵机那里读取到当前的角度的,因此下位机发给上位机的协议暂时没必要实现,暂时只用printf来调试就够了。
这一篇,我们来实现整个系统的调试与运行。
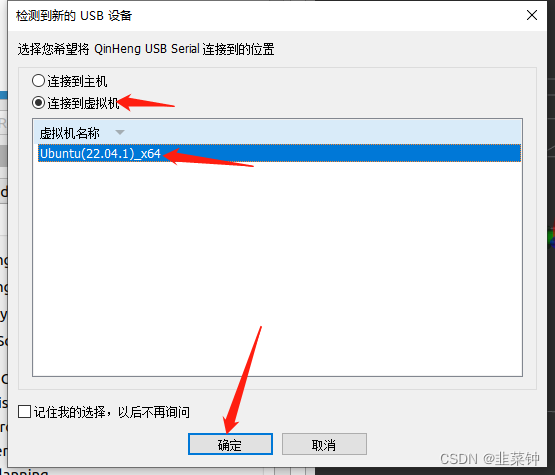
2.串口连接至虚拟机
我这边用的是虚拟机VMware里面运行了个Ubuntu22.04,因此串口需要连接到虚拟机里面。我用的是usb转串口(CH340芯片),在虚拟机开启的情况下,将串口插入电脑时,虚拟机会提示是否接入到虚拟机,选择接入虚拟机即可。
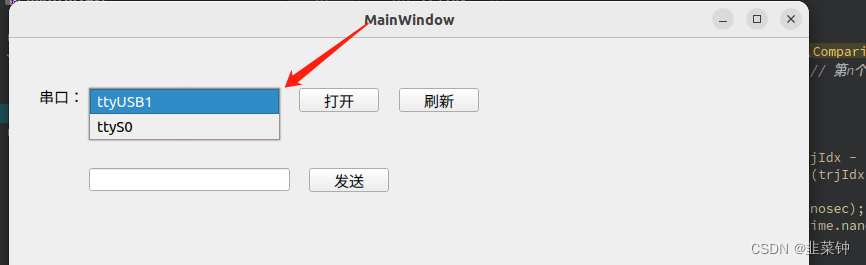
但是接入后,假如打开我们自己写的Qt程序来试图打开串口,会发现枚举不到我们的串口,此时需要按照这个来进行操作:【Ubuntu22.04 CH340系列串口驱动(没有ttyUSB)问题解决方案】
sudo apt remove brltty
此时重新拔插就可以枚举到这个ttyUSB了。
但是此时假如选择打开这个串口的话,会报[permission denied]的错误,无法打开。这个问题可以参考这里解决:【ubuntu 打开串口时permission denied】
3.MoveIt、Rviz、机器人状态节点
参考 【在ROS2中,通过MoveIt2控制Gazebo中的自定义机械手】、【ROS2中用MoveIt2控制自己的舵机机械手(1)】,利用我们从SolidWorks导出的模型构建基本的MoveIt环境。
4.机器人节点
这次我们的机器人节点是用Qt调用ROS库编写的,详情请参考【ROS2中用MoveIt2控制自己的舵机机械手(1)】,【ROS2中用MoveIt2控制自己的舵机机械手(4)】.
我们创建了一个类MyActionRobot ,里面会发布Action用于对接Moveit,同时会把接收到的MoveIt发送过来的路径点位信息发射出去
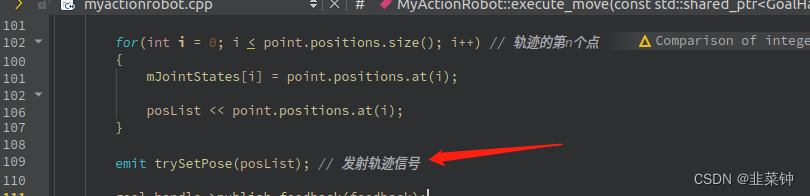
再将该信号连接到串口槽函数中,将点位通过串口发送给下位机,让下位机PCA9685驱动电机。


5.效果
整个系统的运行视频可以看这里:【ROS2中用MoveIt2控制自己的舵机机械手】

6.总结
该机械手在执行MoveIt规划的路径时,会一卡一卡的,主要是因为两方面的原因:1.机械结构松散、2.执行路径时没有进行插补。主要原因是插补、反馈问题,后面再慢慢完善了。
总之,暂时告一段落了。








